新聞中心
中大研究團隊控制微型機械人集群在人體血管內導航及定位
加快臨床應用轉化
由香港中文大學(中大)機械與自動化工程學系副教授張立教授領導的研究團隊,成功掌握控制及追蹤血管內微型機械人集群的技術。他們提出的集群控制及利用超聲波成像輔助定位方法,是微型機械人轉化到臨床應用的關鍵,例如用作標靶藥物遞送以及局部診療。相關研究成果近日於著名國際期刊《科學進展》(Science Advances)上發表。
科學界一直在研究微型機械人在生物醫學方面的應用,其優點是體積細小,能穿越狹窄空間例如微絲血管,將藥物運送到身體指定較深入的部位,達致針對性治療的效果。不過其體積同時是缺點,每個機械人只能攜帶有限的藥物,因此必須有成千上萬機械人同時工作,才能輸送足夠份量的藥物。
在過去的實驗中,研究團隊已可以在簡單的靜態環境下,控制微型機械人集群的組成及控制其移動,以模擬自然界中生物的集體行為,如鳥群、蜂群等。不過在人體血管中實際應用時,機械人群體的形成、導航以及定位均會受到血液流動的干擾,面臨極大技術挑戰。
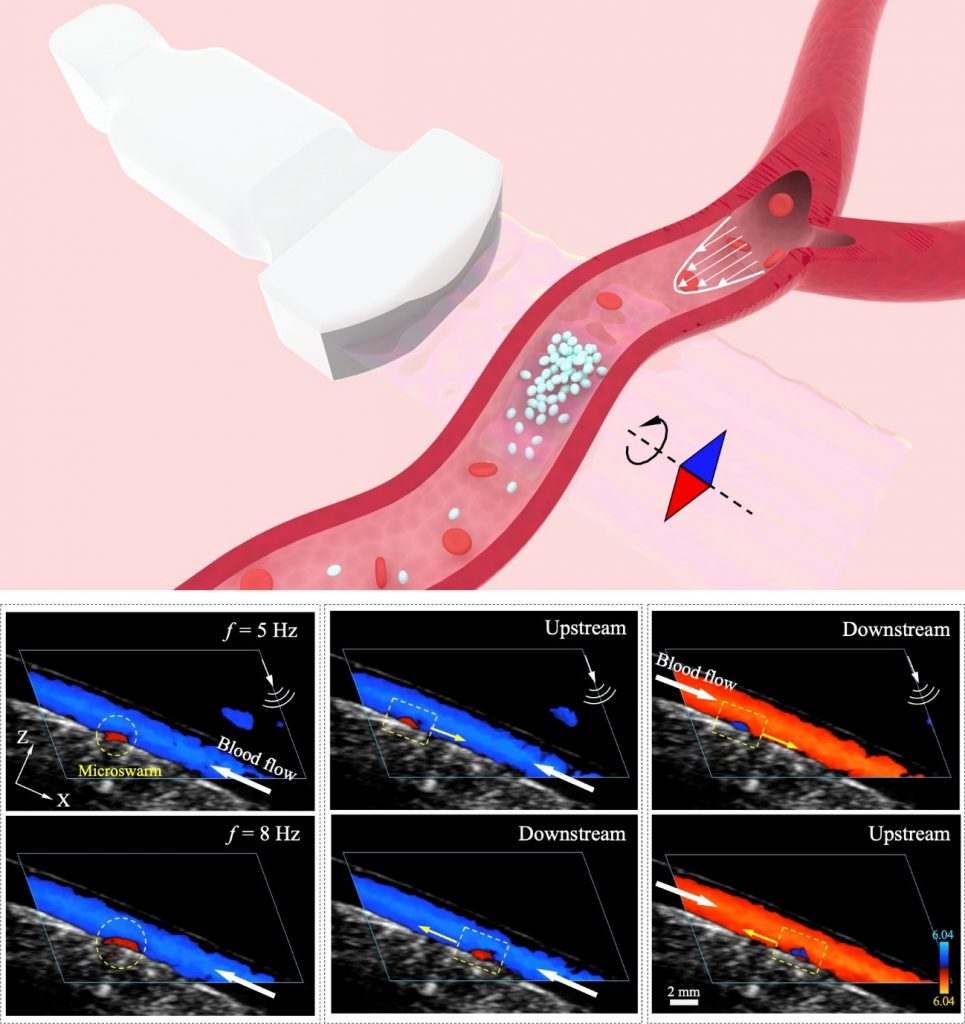
在這項研究中,研究團隊採用多普勒超聲波成像技術(ultrasound Doppler imaging guidance)作為微型機械人集群在血管動態環境實時導航及定位移動的解決方案。多普勒超聲波成像是一種非入侵性的檢測方法,通過判斷高頻聲波經流動紅血球反射後的頻率變化,計算血液流動是否正常。
研究團隊將微型機械人注入血管,在旋轉磁鐵驅動下,機械人在血管壁附近形成集群並跟隨磁鐵運行。由於血管壁附近血流量較低,對集群的組成影響相對較小,而且機械人粒子之間的相互作用較強,令集群可以逆血流而上或者順血流而下。微型機械人集群會隨著磁鐵轉動形成小漩渦,輕微擾亂正常的血流及周圍紅血球的運動,因此可以透過多普勒超聲波成像從多角度實時追蹤集群。即時的超聲波信號回饋和快速的磁力控制,有助在不同的環境(如靜止、連續式流動和脈動式流動)為微型機械人導航。
張立教授表示:「我們最終目標是將微型機械人技術應用於轉化醫學中,例如以微創的方式,在人體內深處進行血管內介入治療。此項目是與中大醫學院及蘇黎世聯邦理工學院的研究人員合作,為破解一些傳統醫療手段難以解決的問題,向前邁進。」
參與是次研究的中大醫學院影像及介入放射學系系主任余俊豪教授指出:「雖然微型機械人技術在血管內介入治療的應用尚處於概念性階段,但它在栓塞術、血流恢復和血管重建等疾病治療方面有很大應用潛力。儘管這項技術的未來仍存在許多不確定因素和挑戰,但隨著工程與放射學等更多跨學科交流及合作,我們有望在這領域看到更多新進展。」
瑞士蘇黎世聯邦理工學院機器人與智慧系統研究所所長Bradley J. Nelson教授強調:「這項工作是微型機械人技術從實驗室轉移至實際醫療應用的關鍵。近年我們與中大的合作已經取得豐碩的研究成果,我們期待能取得更多的合作成果。」
此研究的第一作者、中大王乾乾博士表示:「這項研究首次實現了在動態環境中微型機械人集群的控制與成像。我們正通過更多實驗去驗證將這項技術應用到人體的可行性,並會設計一套自動化系統,把醫學成像技術與磁控系統結合使用。」
此研究獲香港研究資助局(RGC)、創新科技署(ITC)、中大周毓浩創新醫學技術中心和天石機器人研究所的大力支持。張立教授目前帶領研究團隊進行開拓性研究工作,重點在研發新型醫療微型機械人及其遠端控制系統。在過去三年,團隊在研究各種微型機械人特性,包括集群運動、生物混合螺旋形機械人、利用機械人檢測細菌毒素,以及3D/4D打印等領域,取得豐碩的成果,並陸續於各大頂級期刊發布文章,部分項目獲得香港研究資助局 (https://youtu.be/l2NQfgW8tSQ) 及創新科技署 (https://www.itc.gov.hk/enewsletter/180901/en/nanobots_future_surgeons_inside_the_human_body.html)作重點報導。
論文全文請參閱﹕
Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery
https://advances.sciencemag.org/content/7/9/eabe5914




張立教授領導中大微型機械人研究團隊。
余俊豪教授。

瑞士蘇黎世聯邦理工學院Bradley J. Nelson 教授參與是次研究。

磁性納米顆粒集群在多普勒超聲波成像引導下,在流動血液中逆流而上。

張立教授。